Advanced stuf for robot Junior¶
Avertissement
Pour fonctionner la maquette à besoin de la station sol à cause du NRF24 bloquant (sauf si la ligne est commentée).
Bilan hardware¶
La liste des broches utilisées dans la version de base se trouve dans les fiches pédagogiques 1 sous Github
La dessus, on ajoute 6 broches pour le capteur du Suiveur de ligne (6,8,10,14,16,18)
Le module NRF24 pour la télémétrie utilise les broches SPI cf Télémètrie / RF transmissions ainsi que 48 et 49
La mesure de la tension batterie est sur A0
Suiveur de ligne¶
Projet très ressemblant sur Hackster.io 2
3 capteurs IR de chaque côté
Ajout d’un connecteur 8 points.
Pin |
Signal |
Arduino pin |
|---|---|---|
1 |
GND |
|
2 |
D EXT |
6 |
3 |
D MID |
8 |
4 |
D INT |
10 |
5 |
G INT |
14 |
6 |
G MID |
16 |
7 |
G EXT |
18 |
8 |
P5V |
Résultats¶
Enregistrement avec station sol NRF24L01
Station sol NRF24¶
- Test du 23/11/2019 à 18:52
VBAT 6.9V à 7.4V
vitesse : 90
Durée du test : 072725 au chrono manuel 1:11:53
les 4 points; 08:80, 24:68, 47:97, 1:03:21 (En ms 8800, 24680, 47970, 63210, 71530).
Essais de vitesse : 7.0V 120 ok putty_tx_191123_2131
Remplacement des batterie 7.8V(ie 8.4V à vide) KO pour 120 7.7 90 OK putty_tx_191123_2316.log en 57s 7.7V vitesse 110 ok 46s putty_tx_191124_0000.log
Temps de cycle à 10ms putty_tx_191124_0008.log TC 10ms V 110 BAT 7.7V putty_tx_191124_0017.log US actif refresh every 10ms
Mesure de vitesse¶
Sur une ligne droite de 3m parcours en 7s (vitesse dans le code : 110, tension bat-moyenne: 7.45V) 3/7 m/s soit 42.85cm/s = 1.54km/h Diam roue = 65mm Périmètre = 204mm on tourne à 2.1 tr/s soit environ 126tr/min Mesure au tachymetre à vide : 171 RPM
Même essai à 90 (7.42V pour 7.87V à vide) : 3m en 9.4s à 70 : 3m en 16.7s
Avec batterie full : 13.5s avec 90 8.43s fichier non conservé avec 110 6.5s Vbat_moy : 7.65V - en charge - mesurées à 8.18V à vide fichier : putty_tx_191126_2317_3m_110_full.log
V=200 4.6s, VBAT 7.5V
Le reste des résultats est consigné dans le fichier Excel : speeds.xlsx
En conclusion on est à environ 110tr/min
Calcul du demi tour¶
Diametre de roue 65mm, soit un périmètre de 204mm.
Vitesse 120tr/min (Vbat 7.2V consigne 115) soit 2tr/s soit encore 0.02tr/cycle de 10ms.
Ce qui nous donne un déplacement de’environ 4mm/cycle (204*0.02).
Pour faire un demi tour en bloquant une roue, il faut parcourir un demi périmètre du cercle décrit par une roue (entraxe des roues 110mm).
Distance à parcourir pixD/2 soit encore pi*R soit 346mm à raison de 4mm/cycle, il faut 86.5 cycles.
Résultat expérimental : avec 90 cycles on a seulement un bon tiers de tour.
Explication : au démarrage de la rotation la roue en rotation « broute ».
Par expérimentation (branche cpUnTour) on arrive à environ 120 cycles pour un demi-tour.
En activant les 2 roues une en avant et l’autre en arrière la valeur serait de 55, le mouvement est alors plus agréable.
Maitrise des déplacements¶
A VBAT = 7.5V, V = 110, on fait du 4mm/cycle de 10ms A VBAT = 7.5V, V = 70, on fait du 2mm/cycle
Fin des travaux suivenur de ligne décembre 2019¶
- Resterait à faire:
évaluation du sens du virage avant la perte de ligne
ralentir dans les virages
plusieurs canaux de télémétrie (BLE4.0 et LORA cartes reçues)
adapter la vitesse en fonction de la tension batterie
ajouter l’odomètrie
Télémètrie / RF transmissions¶
Besoin débit¶
Exemple:
On part sur 32 octets soit 320bits en moins de 1ms à transmettre
1 bits (1/320)ms = 3.215 10-6 environ 312kbits/s
Trame: (séparateur ,)
Sensor gauche (1c),Sensor droit (1c),Vbat(3c),reserve (3c) soit 11 octets
Exemple:
4,0,3.2,0.0
11 octets trasmis en 1ms (max)
10-3/110 = 9us/bits soit 110kbits/s
Choix du module RF¶
Très bonne vidéo youtube: Electronoobs 3
433MHz low cost modules¶
Utilisation de module 433MHz solution rapidement abandonnée porté insufisante au travers des murs.

Modules RF 433MHz¶
Deux fils de 173mm de long pour les antennes des modules radio.
Communiquer sans fil en 433MHz avec la bibliothèque VirtualWire et une carte Arduino / Genuino sur les carnets du maker 4
Très bon article sur DroneBot Workshop 6
ACP220 modules¶
On a pas réussi à les faire fonctionner
Nous avons réussi à les faire communiquer avec le logiciel prévu pour les paramètrer: RF-Magic
A condition de lancer le logiciel en mode admi (sous W7) et de changer le nom du port COM pour un nom ne comportant qu’un seul digit de COM37 vers COM2 par exemple.
Essais à 433MHz, 470, 434 avec les même id node et des id différents. sans aucun succès.
Module récupérer il y a quelques année impossible de dire s’ils étaient fonctionnels.
NF24¶
Utilisation de la librairie : RF24 from TMRh20 7 disponible sur github mais aussi directement dans le gestionnaire de librairie ARDUINO. Librairie très bien renseignée avec une documentation très complète sous Doxygen.
Les modules NRF24RL01 8 utilsés proviennent de chez Amazon.
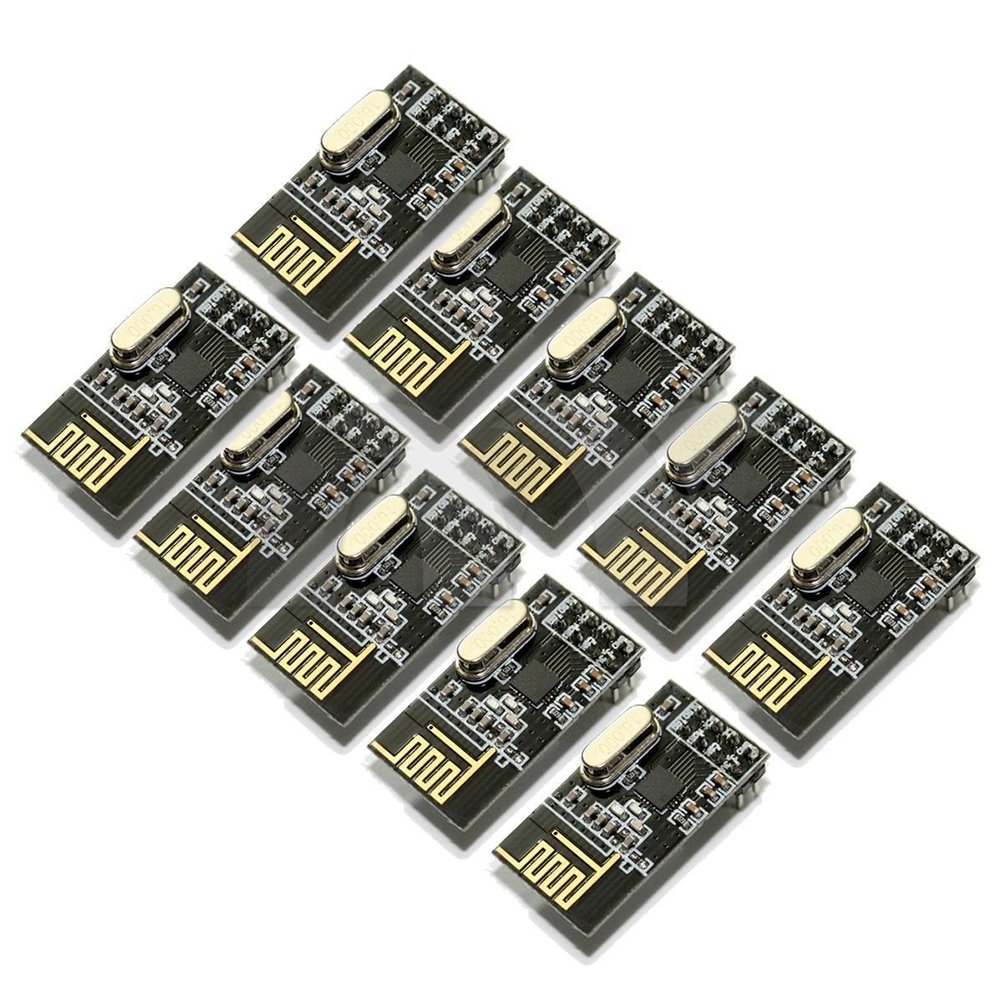
NRF24L01 modules¶
Réussite. Transfert de 4 puis 8 octets à 2Mbps.
Le temps total d’aller et retour est d’environ 1.4ms. Utilisation du sketch exemple GettingStarted.ino Léèrement modifié.
/*
* Getting Started example sketch for nRF24L01+ radios
* This is a very basic example of how to send data from one node to another
* Updated: Dec 2014 by TMRh20
*/
#include <SPI.h>
#include "RF24.h"
/****************** User Config ***************************/
/*** Set this radio as radio number 0 or 1 ***/
bool radioNumber = 1;
/* Hardware configuration: Set up nRF24L01 radio on SPI bus plus pins 7 & 8 */
RF24 radio(7,8);
/**********************************************************/
byte addresses[][6] = {"Node1","Node2"};
// Used to control whether this node is sending or receiving
bool role = 0;
unsigned long cpt = 0;
void setup() {
Serial.begin(115200);
Serial.println(F("RF24/examples/GettingStarted"));
Serial.println(F("*** PRESS 'T' to begin transmitting to the other node"));
radio.begin();
// Set the PA Level low to prevent power supply related issues since this is a
// getting_started sketch, and the likelihood of close proximity of the devices. RF24_PA_MAX is default.
radio.setPALevel(RF24_PA_MAX);
if( radio.setDataRate( RF24_2MBPS ) ) Serial.println("speed is now 2Mbps");
// Open a writing and reading pipe on each radio, with opposite addresses
if(radioNumber){
radio.openWritingPipe(addresses[1]);
radio.openReadingPipe(1,addresses[0]);
Serial.print("Je suis le node : ");Serial.println( (char *)addresses[1] );
}else{
radio.openWritingPipe(addresses[0]);
radio.openReadingPipe(1,addresses[1]);
Serial.print("Je suis le node : ");Serial.println( (char *)addresses[0] );
}
if ( !radio.isChipConnected() ){
Serial.println(" Pb connection ! Aborted.");
for(;;);
} else {
Serial.println( "appreil bien connecte.");
// for(;;);
}
Serial.print("pa level : "); Serial.println( radio.getPALevel() );
Serial.print("Payloadsize : ");Serial.println( radio.getPayloadSize() );
// Start the radio listening for data
radio.startListening();
}
void loop() {
/****************** Ping Out Role ***************************/
if (role == 1) {
Serial.println("TX role");
radio.stopListening(); // First, stop listening so we can talk.
Serial.println(F("Now sending"));
// unsigned long start_time = micros(); // Take the time, and send it. This will block until complete
unsigned long start_time[2];
start_time[0]= micros(); // Take the time, and send it. This will block until complete
start_time[1]= millis();
if (!radio.write( start_time, 2*sizeof(unsigned long) )){
Serial.println(F("failed"));
}
radio.startListening(); // Now, continue listening
unsigned long started_waiting_at = micros(); // Set up a timeout period, get the current microseconds
boolean timeout = false; // Set up a variable to indicate if a response was received or not
while ( ! radio.available() ){ // While nothing is received
if (micros() - started_waiting_at > 200000 ){ // If waited longer than 200ms, indicate timeout and exit while loop
timeout = true;
break;
}
}
if ( timeout ){ // Describe the results
Serial.println(F("Failed, response timed out."));
}else{
unsigned long got_time[2]; // Grab the response, compare, and send to debugging spew
radio.read( got_time, 2*sizeof(unsigned long) );
unsigned long end_time = micros();
// Spew it
Serial.print(F("Sent "));
Serial.print(start_time[0]);
Serial.print(start_time[1]);
Serial.print(F(", Got response "));
Serial.print(got_time[0]);
Serial.print(got_time[1]);
Serial.print(F(", Round-trip delay "));
Serial.print(end_time-start_time[0]);
Serial.println(F(" microseconds"));
}
// Try again 1s later
delay(1000);
}
/****************** Pong Back Role ***************************/
if ( role == 0 ){
// unsigned long got_time;
unsigned long got_time[2];
// Serial.print("Role peroquet.");
// Serial.println( cpt++);
if( radio.available()){
// Variable for the received timestamp
while (radio.available()) { // While there is data ready
radio.read( got_time, 2*sizeof(unsigned long) ); // Get the payload
}
radio.stopListening(); // First, stop listening so we can talk
radio.write( got_time, 2*sizeof(unsigned long) ); // Send the final one back.
radio.startListening(); // Now, resume listening so we catch the next packets.
// Serial.print(F("Sent response "));
// Serial.println(got_time);
}
}
/****************** Change Roles via Serial Commands ***************************/
if ( Serial.available() )
{
char c = toupper(Serial.read());
if ( c == 'T' && role == 0 ){
Serial.println(F("*** CHANGING TO TRANSMIT ROLE -- PRESS 'R' TO SWITCH BACK"));
role = 1; // Become the primary transmitter (ping out)
}else
if ( c == 'R' && role == 1 ){
Serial.println(F("*** CHANGING TO RECEIVE ROLE -- PRESS 'T' TO SWITCH BACK"));
role = 0; // Become the primary receiver (pong back)
radio.startListening();
}
}
} // Loop
La doc de la méthode write, nous apprend que c’est une méthode bloquante et que la pyload est fixe.
La méthode getPayloadSize() renvoi 32. donc que nous transmettion 8 ou 32 octets le temps sera identique !
On atteind facilement les extrémité du lab en conservant 1.5ms.
Avertissement
Les broche 7 et 8 étaient inversée.
/**
* Arduino Constructor
*
* Creates a new instance of this driver. Before using, you create an instance
* and send in the unique pins that this chip is connected to.
*
* @param _cepin The pin attached to Chip Enable on the RF module
* @param _cspin The pin attached to Chip Select
*/
RF24(uint16_t _cepin, uint16_t _cspin);
Temps d’émission mesuré avec la technique de micros : 700us entre mon poste et l’autre extrêmité du lab.
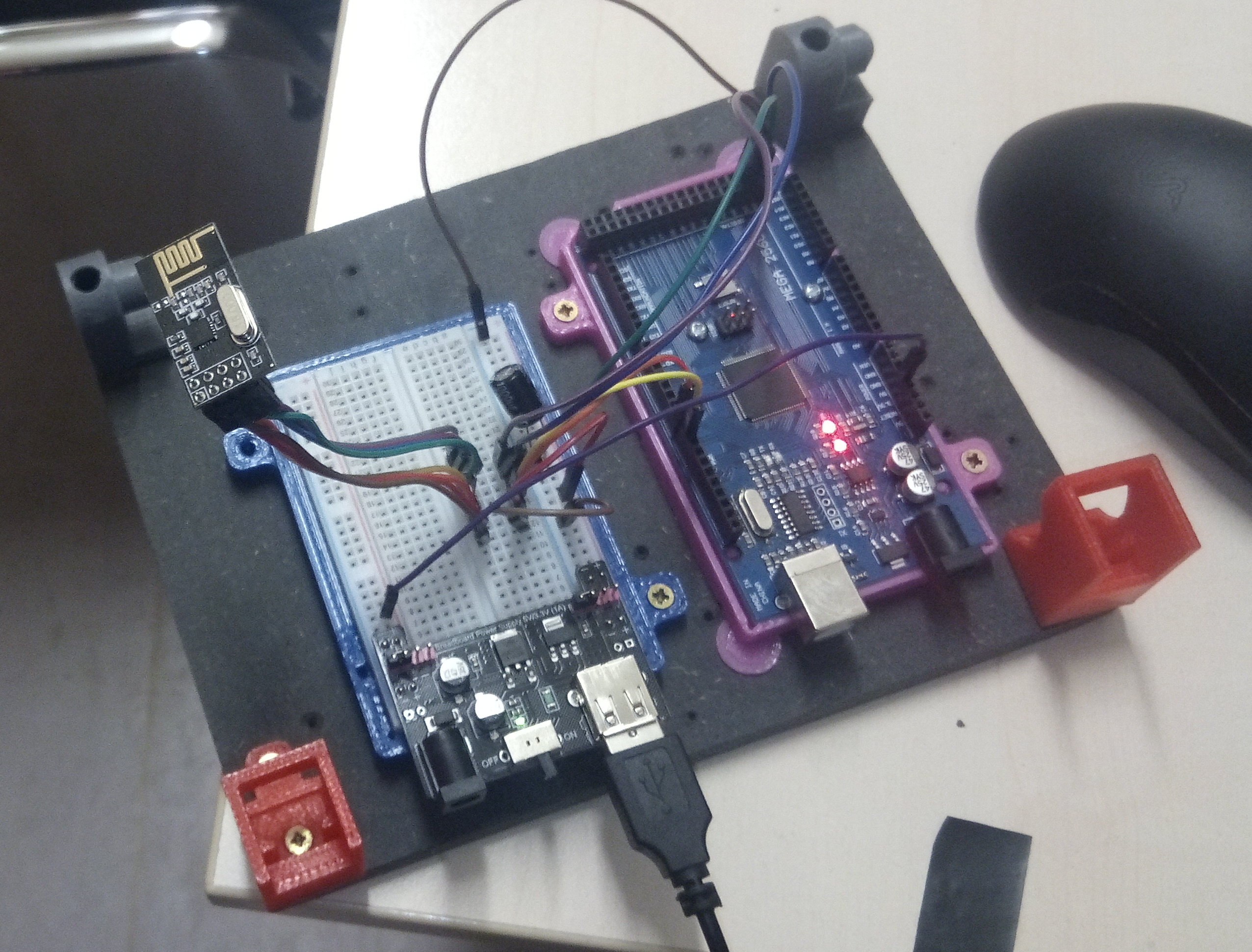
Mise en place du module NRF24 sur le robot¶
Sur la maquette ainsi que sur la version PCB, nous n’avons que peu de lattitude pour ajouter des modules. Chance, la 2560pro fourni un petit connecteur de 6 IO que nous n’avons pas utilisé.
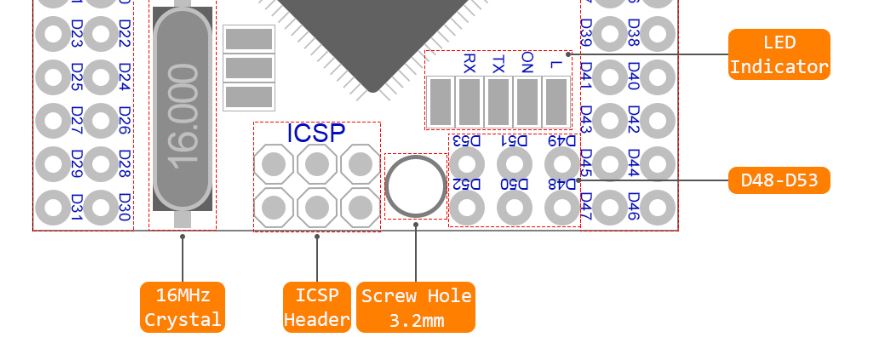
Connecteur 2560pro 6 io¶
En réalité, ces 6 broches ne sont pas vraiment disponibles si on veut utiliser le bus SPI. En effet, sur l’ATMega2560 le bus SPI est sur ces broches… seules 48 et 49 sont vraiment disponibles.
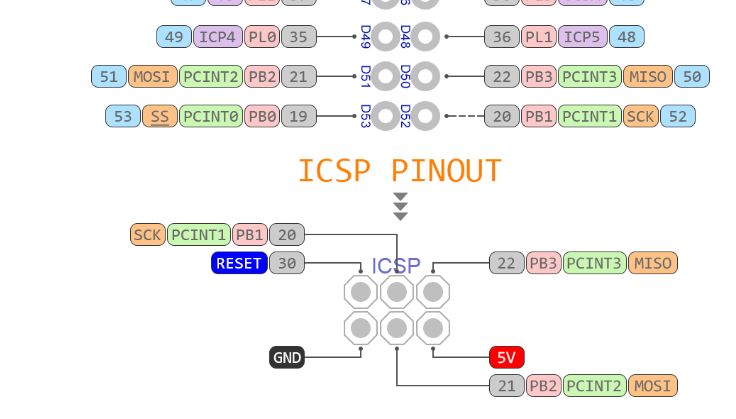
Connecteur 2560pro 6 Connecteur 2560pro partage SPI¶
Réalisation d’un adaptateur :
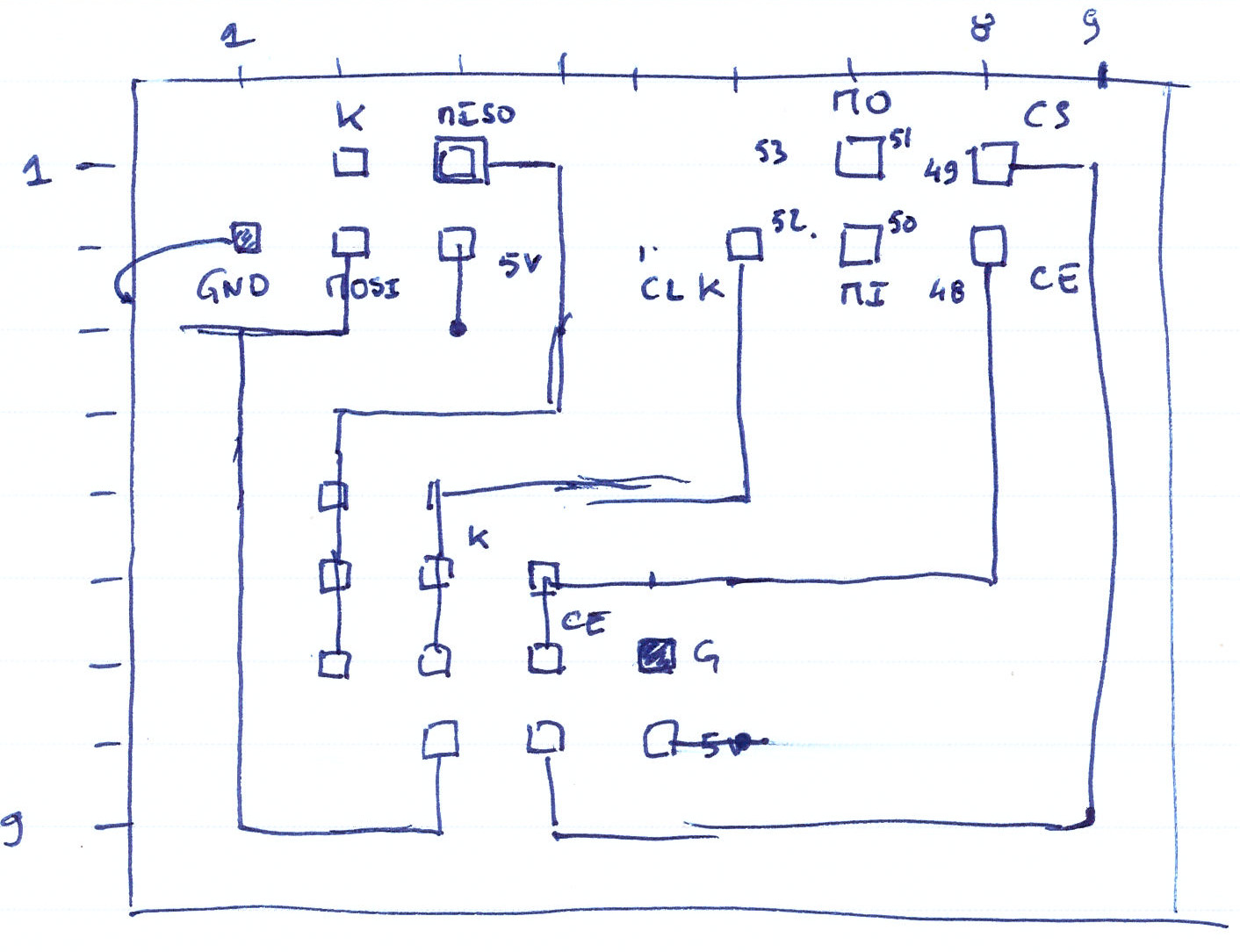
Adatateur NRF24 plan de cablage¶
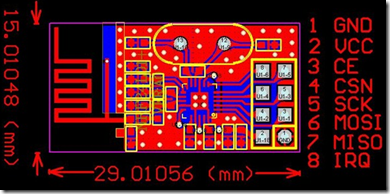
NRD24L01 pinout¶
texte
Autres solutions à explorer¶
XBEE : product line sur protocole ZigBee
Diffcile à approvisionner sur le marcher chinois et relativement honéreux.
Dispo XBEE chez MOUSER 9 à 18€ sans antenne sachant qu’il en faut au moins 2
Préférer les modules en 2.4GHz à mon avis (pifométrique)
LORA un bon exemple sur Hacksterio 10
BLE4.0
Modules BLE sur AMAZON 11 à 9.99€ pièce
Modules BLE sur aliExpress 12 à 2.33€ basé sur un CC2541 de TI
BLE5.0 sur AMAZON 14 9.99€ basé sur un CC2640R2F de TI
RPM Mesure¶
140 à vide pouvant descendre jusqu’à 50 en charge mais une valeur raisonnable semble être 130 rpm. Pour un PWM à 100
260 RPM full batterie et PWM à 250
109 RMP full batterie et pour PWM 70
109 rpm avec des roues de 66mm Soit 1 tour 66x2xpimm = 415mm x 109 / 60 soit 753mm/s ou encore 0.753mm/ms 3.77mm / cycle de 5ms
Mesure de temps de cycle¶
Mesure du temps nécessaire pour exécuter la mise à jour des pwm moteur
méthode : void CRobotJunior::update()
Branche devJojo_sans_OptiVersionAvecTlmNRF24, commit : 53488c
Temps mesuré à l’oscilloscope 69us (y compris les 2 digitalWrite qui prennet chacun environ 9us)
Plus grâve est le temps de répétition qui vaut une vingtaine de ms très instable. Cause identifiée : les capteurs ultrason et leur timeout à 30ms utilisant la fonction pulse bloquante.
une solution élégante serait de fixer le timeout à 2900us soit 50cm.
En désactivant tout, le temps de cyle est à 5ms/+1.4ms : ce jitter de 1.4ms est inexplicable et persiste même en aillant désactivé tous les update de la méthode robot.update(). Un début d’explication serait dans l’implémentation de la foinction millis elle-même voir sur le forum ARDUINO 16
Weblinks¶
- 1
- 2
https://www.hackster.io/cytron-technologies/building-a-low-cost-line-following-robot-c4a32e
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
https://www.hackster.io/xreef/lora-e32-device-for-arduino-esp32-or-esp8266-library-728a86
- 11
- 12
- 13
https://www.electroschematics.com/getting-started-with-ble-and-arduino/
- 14
- 15
http://www.dsdtech-global.com/2019/01/dsdtech-sh-11-ble.html
- 16
- 17
