Infos générales sur le projet Permis C 2019¶
- Auteur
- Projet
Permis C 2019
- dépôt_GitHub
- documentation
- page_wiki
http://www.vorobotics.com/wiki/index.php?title=Nos_Projets#Robots
- Licence
CC BY-NC-SA 4.0
- Liens
Documentation du projet¶
Table des matières
- Auteur
J.Soranzo
- Date
mounth 2019
- Societe
VoLAB
- Entity
VoRoBoTics
Présentation¶
Il s’agit à la fois de décrire ici un atelier d’initiation à la programmation à destination des collégiens et lycéens ansi que la conception d’un robot 2 roues conçu par le VoLAB spécialement à cette occasion.
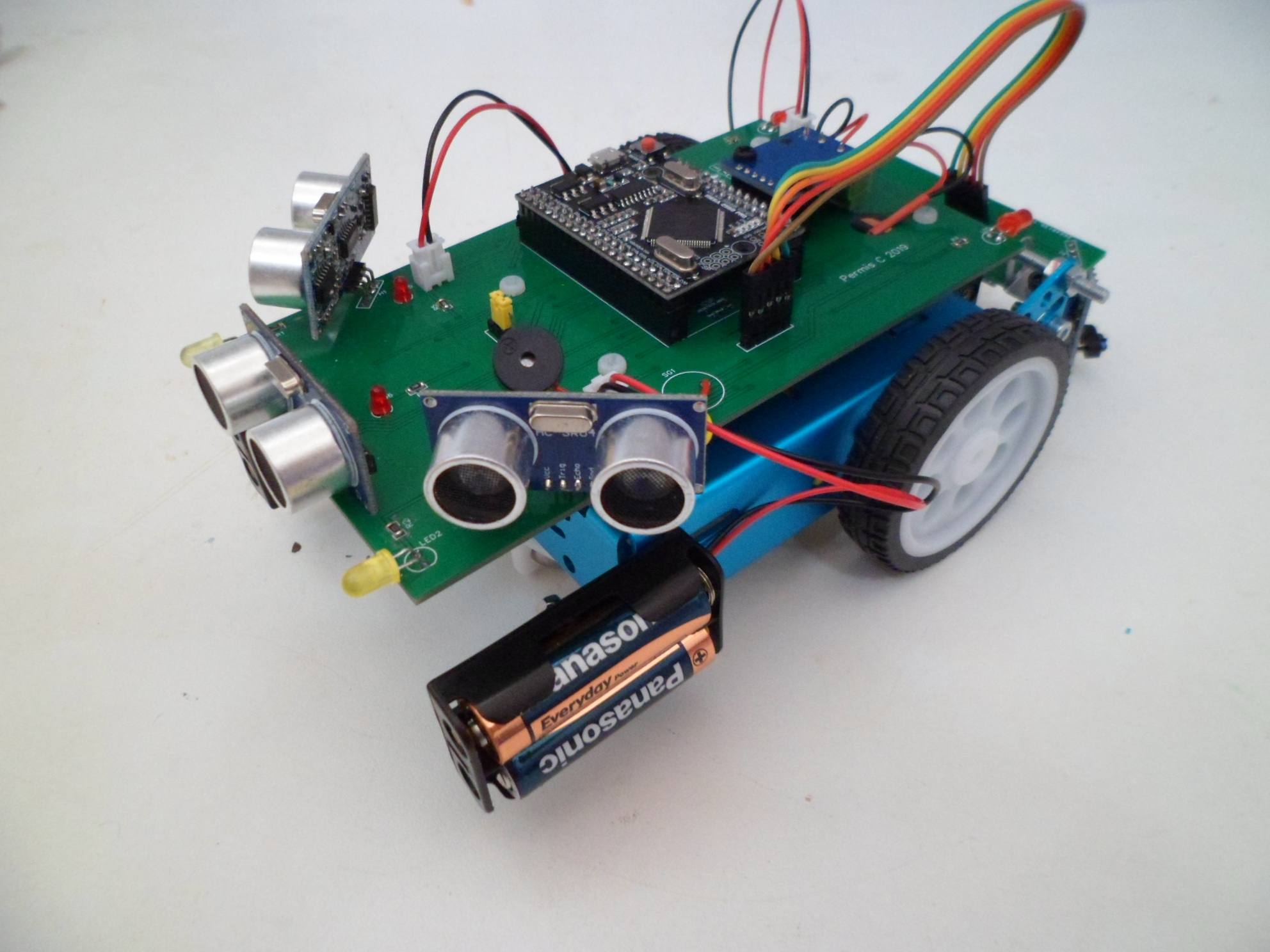
Le robot Permis C 2019¶
Caractéristiques du robot¶
Capteurs: 3 capteurs ultra son SRF-04 à l’avant (détection 2cm à 3m), 3 capteurs infrarouge à l’arrière
Motorisation : 2 moteurs à courant continu 200R / min 1:48
Driver moteur : L9110S
Calculateur : Arduino 2560 Pro 1
1 buzer
7 LED
Diamètre des roues : 65mm
Dimension: 220x130x85mm
Masse: 450g sans les piles
Alimentation: 6 piles AA
Assembler son Robot¶
Voici les grandes étapes pour fabriquer notre robot.
#. Commander les 2 cartes électronique sur le site EasyEda.com 2 (tips commandez les cartes nues chez le partenaire d’EasyEDA à savoir Jlpcb qui est en liens directes depuis le site de EasyEDA)
commander les composants
souder les composants sur la carte principale et sur la carte capteur infrarouge
Les cartes électroniques¶
Carte principale 3 et Carte capteurs infrarouge 4
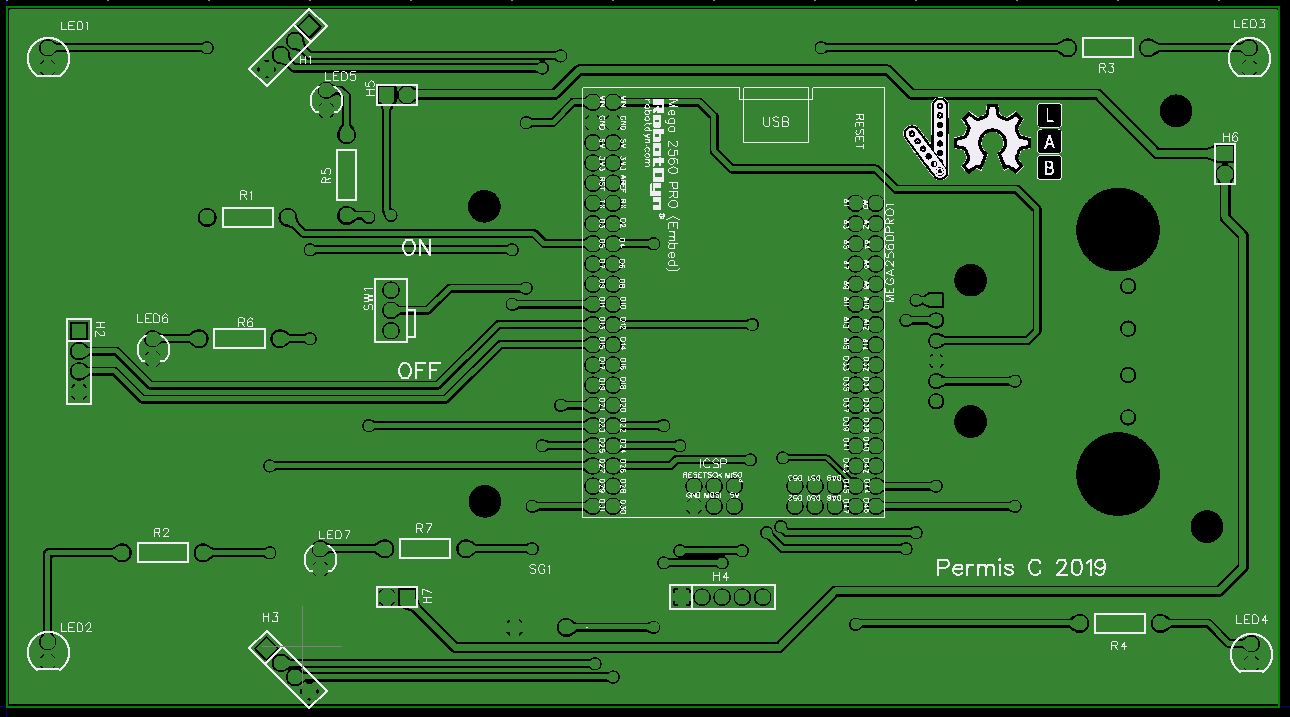
Fichier Gerber carte principale¶
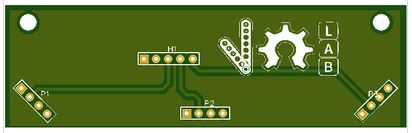
Fichier Gerber carte capteurs infrarouges¶
Liste des composants¶
Attention il existe 2 type de cartes 2560 pro une avec connecteur usb et l’autre sans !
Souder les composants sur les cartes¶
On commencera par les composants les moins hauts (comme les résistances) pour terminer avec les composants les plus hauts comme les capteurs ultrasons
Attention le buzzer à un sens de montage qui ne figure pas sur la sérigraphie de la carte (un oubli)

Sens de montage du buzer (tourné vers l’arrière)¶
Idem pour les connecteurs des piles.
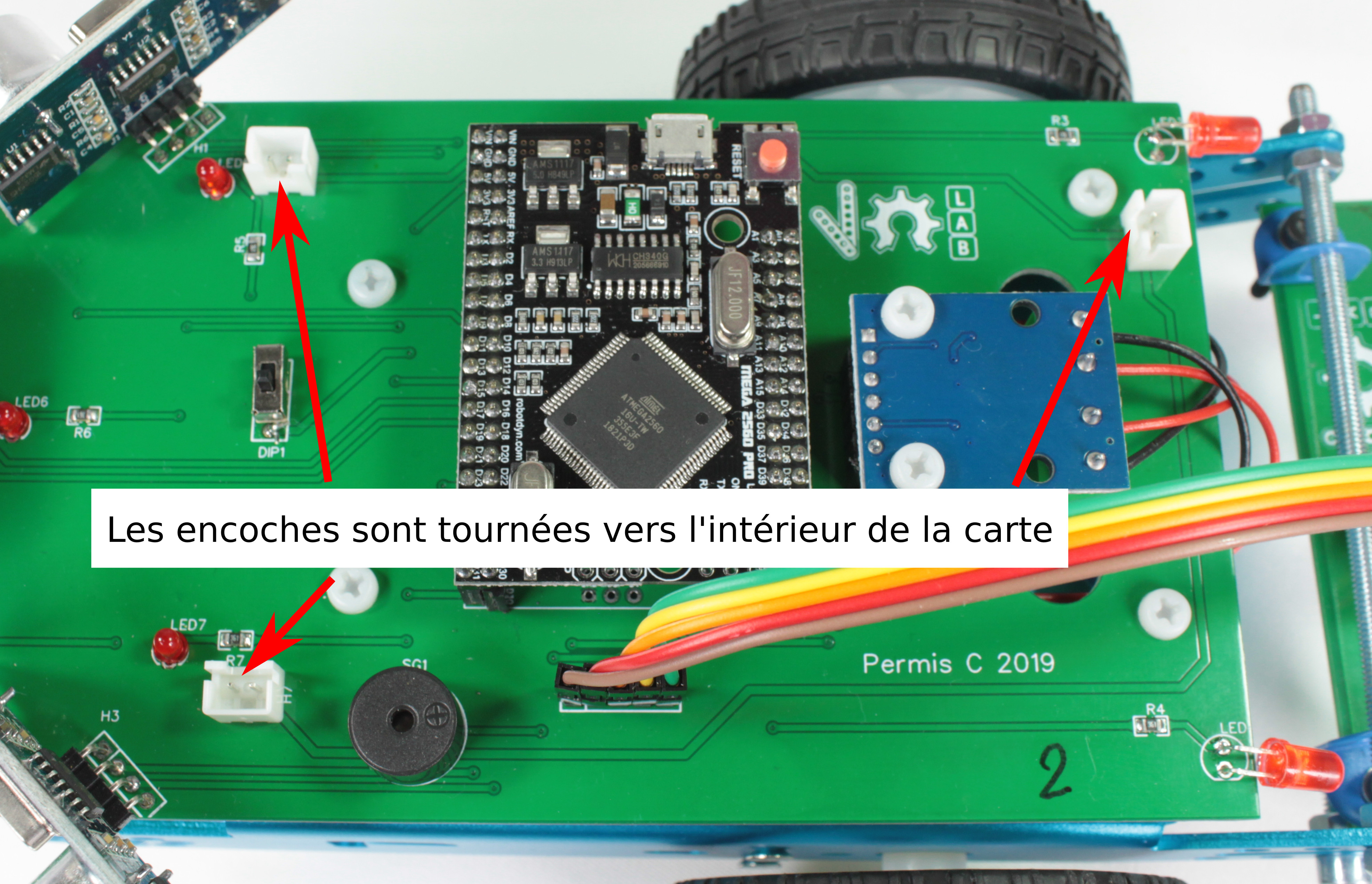
Sens des embase XH de piles¶
Préparer les connecteurs des blocs de piles (qui sont livrés sans connecteur).
Attention au sens des fils comme sur la photo ci-dessous
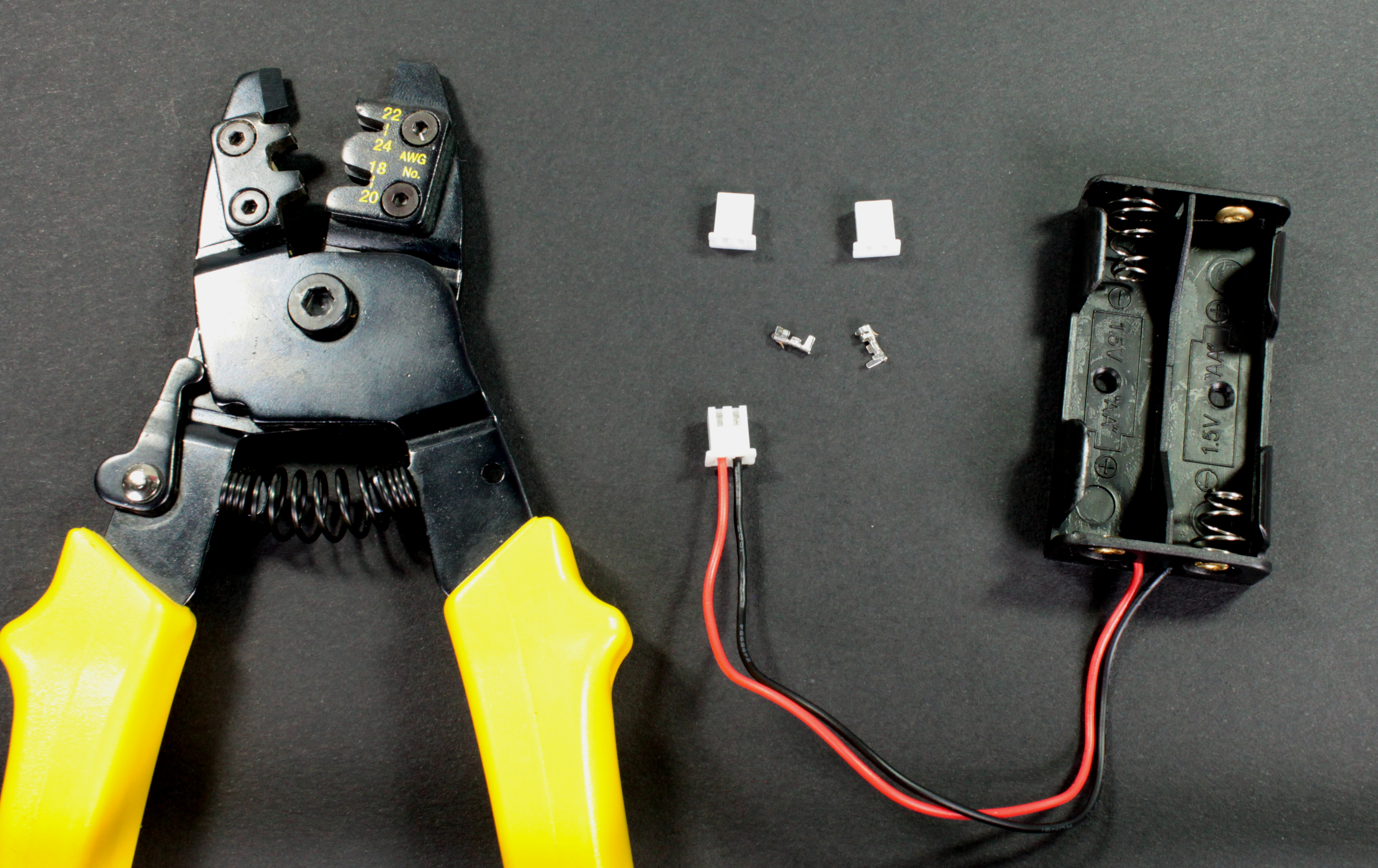
Pince et bloc de piles¶
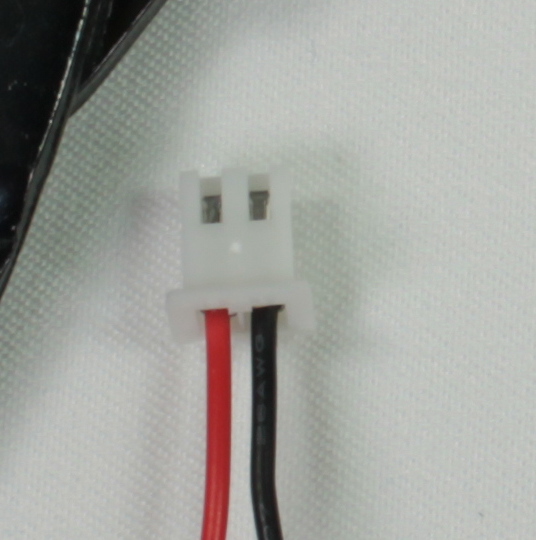
Détail connecteur pile¶
et souder 15cm de fil noir et rouge sur les moteurs (le fil rouge à doite)
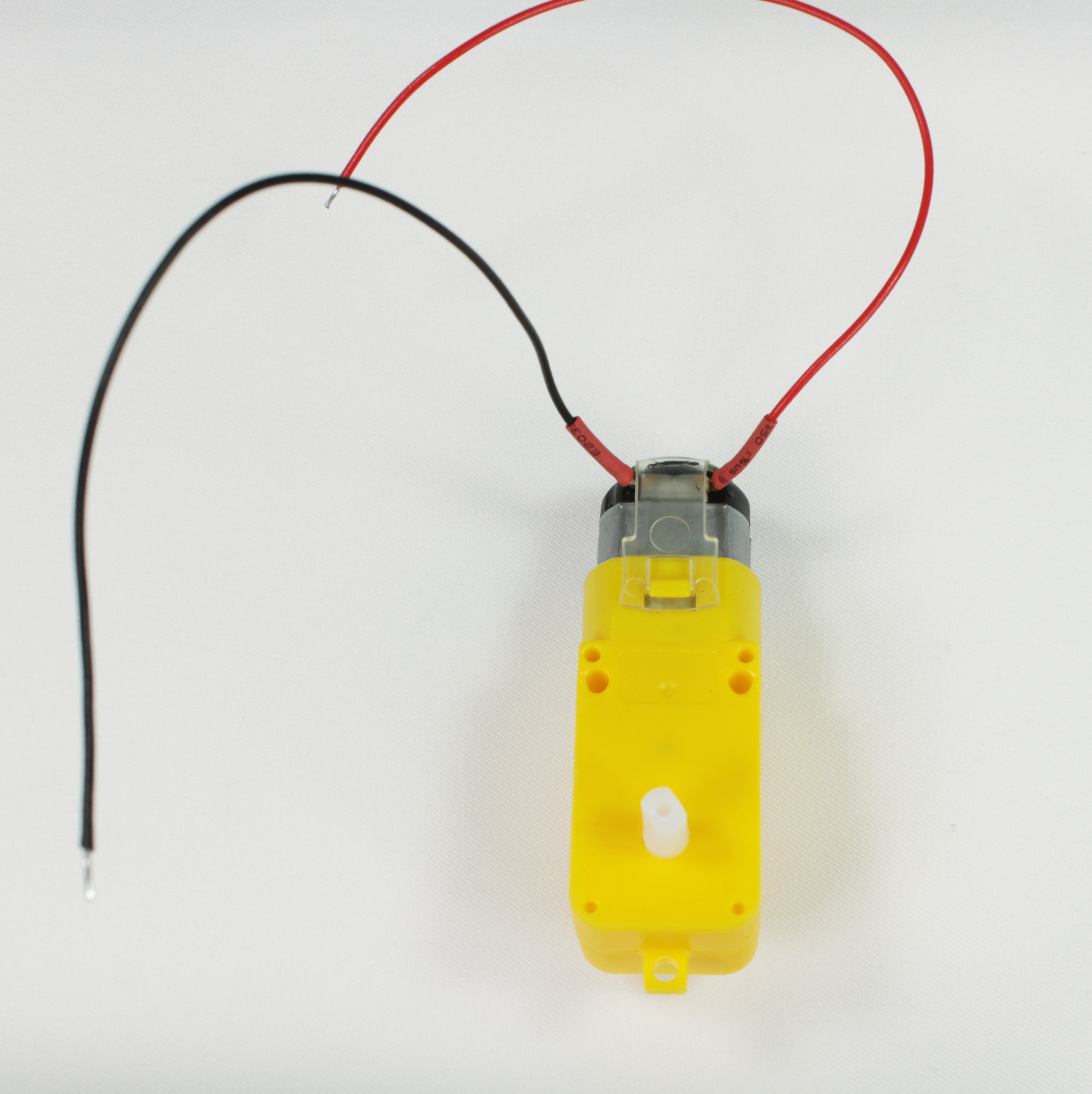
Fils souder sur le moteur¶
Penser à étamer l’autre extrêmité de chaque fil cela facilitera l’insertion dans les connecteur à vis de la carte L9110.

Détail borniers de la carte L9110¶
Attention cette opération est délicate et les broches métalique de ces petits moteurs bon marcher sont fragile. Si vous ne le sentez pas poussez la porte d’un fablab près de chez vous, il y aura certainement une bonne âme pour vous aider.
Ajout de dernière minute. Suite à nos essais, nous avons constaté qu’il convient d’ajouter un condensateur de filtrage sur l’alimentation des moteurs de 470uF/16V.
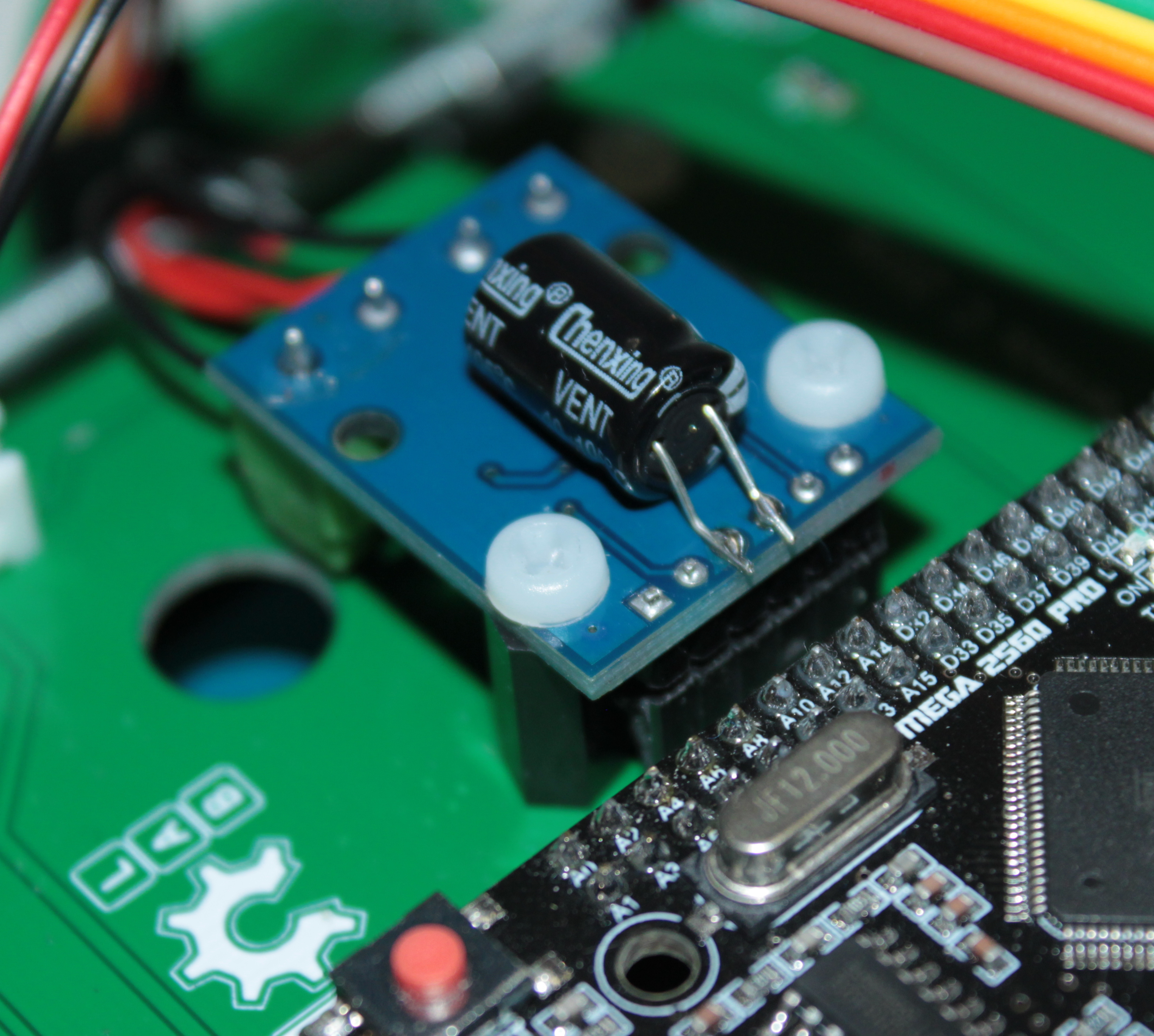
Condensateur 470uF/16 sur l’alimentation moteur¶
Montage mécanique¶
Liste des outils nécessaires¶
Tournevis crussiforme PH1
clés 6 pans de 2, 2.5 et 3 mm
clés plate de 5.5 et 7
clé tube de 5.5 et 7
tournevis plat plus petit que 3.5mm (lergeur de la lame)
Les étapes du montage¶
monter les 4 colonnettes nylon sur le châssis
montage des moteurs (ne pas mettre les roues tout de suite)
monter les 3 blocs de piles
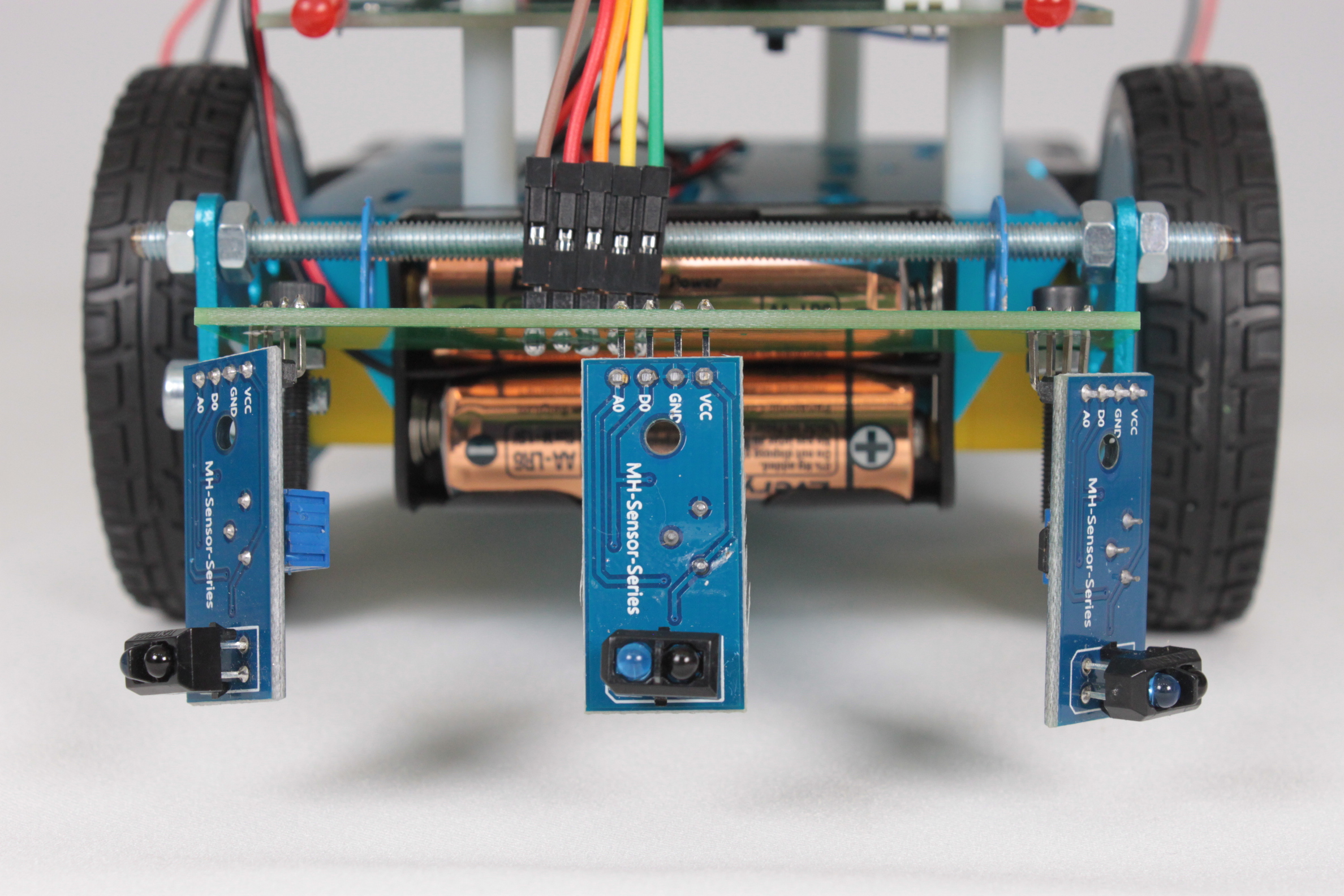
monter la carte capteur infrarouge à l’arrière avec sa chargnière (opération un peu délicate)
monter le bal caster en dessous (la bille)
monter la carte électronique principale
connecter les 3 boîtiers de piles à la carte principale
relier la carte capteurs infrarouge à la carte principale
insérer la carte ARDUINO dans son emplacement
connecter les moteur à la carte L9110 puis mettre celle-ci en place sur la carte principal
Oui vous pouvez mettre les roues !
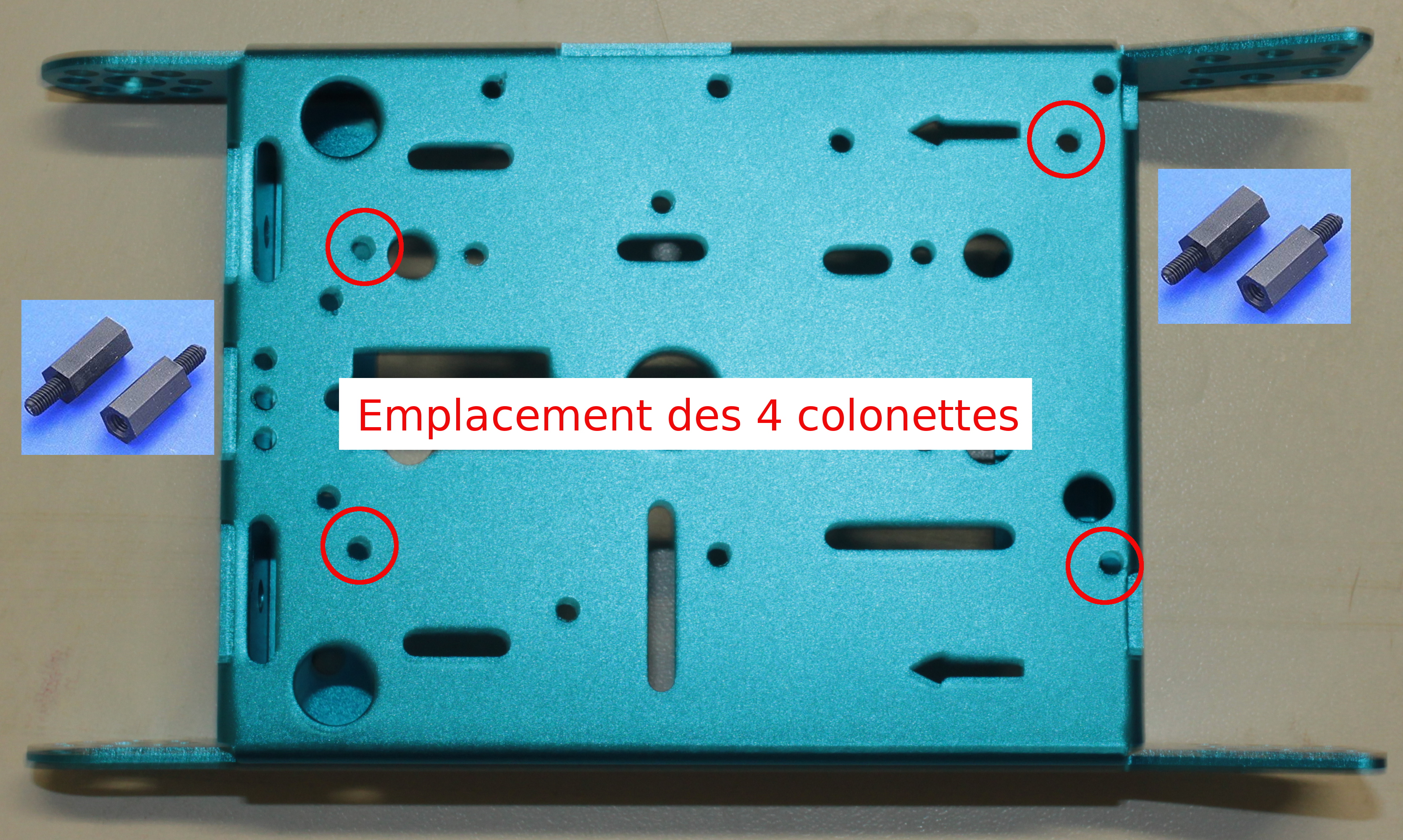
Emplacement des 4 colonettes - trous filetés pas besoin d’écrou¶
Détail charnière arrière¶
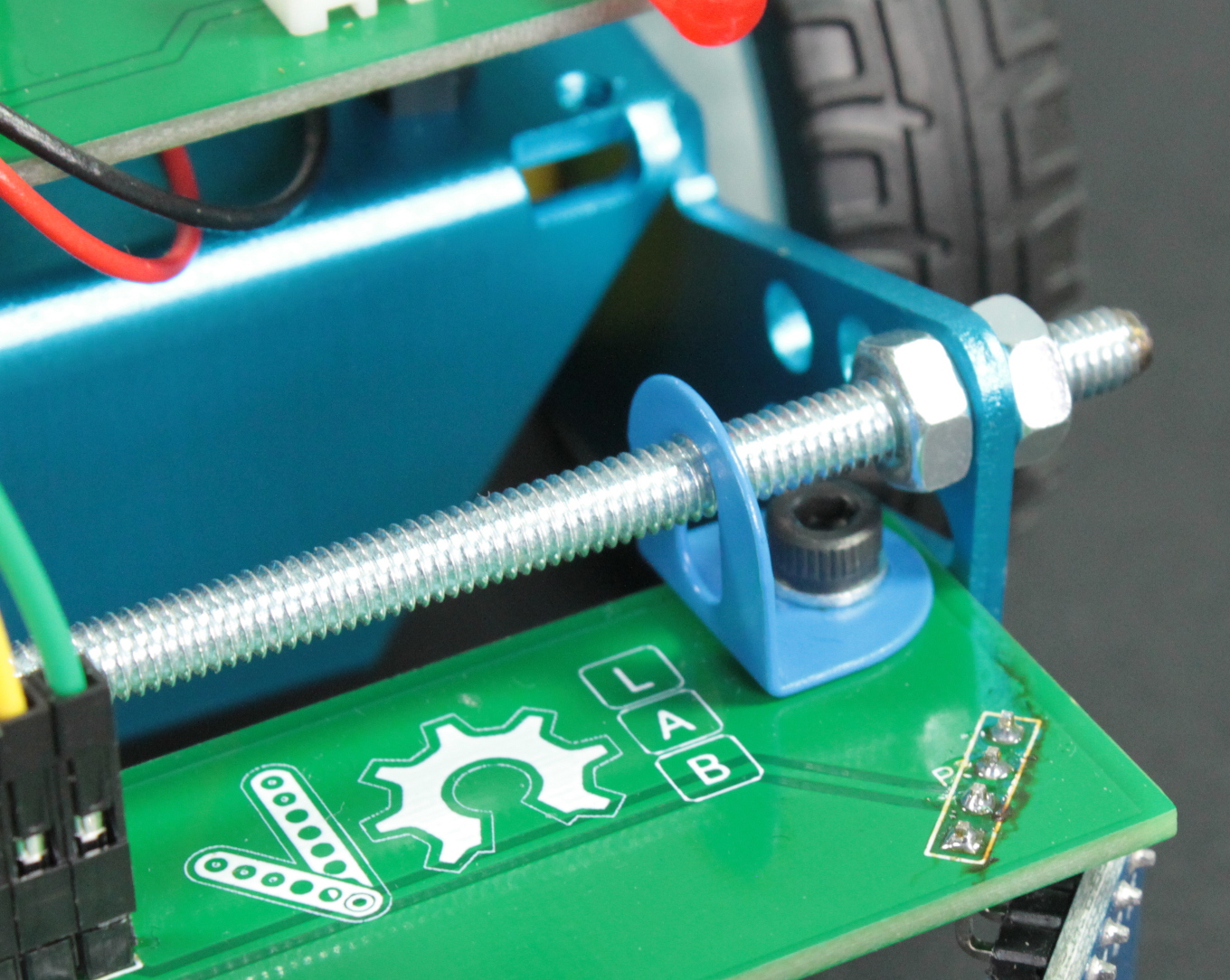
Détail de la petite équerre.¶
Attention les fils rouges des moteurs doivent être connecté en partant du centre de la L9110. Attention également à bien connecter le moteur de droite à droite !
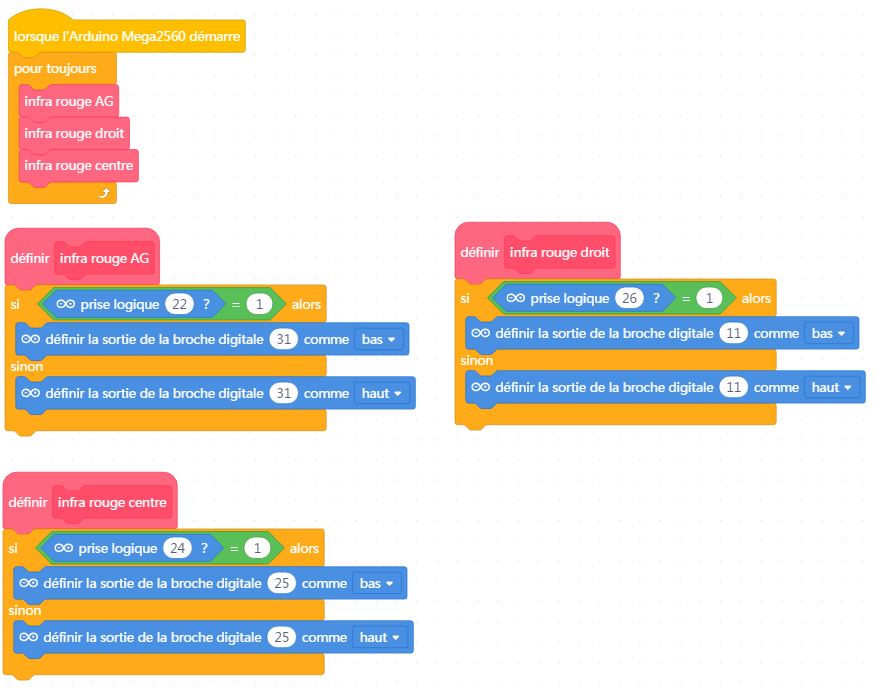
Programmer son robot¶
La programmation du robot se fait grâce à MBlock de chez MakeBlock 5
Et pour vous aider, Professeur Gilles ;-) nous a rédigé de jolies fiches pédagogiques 6
Pour aller plus loin¶
Si vous le désirer ce robot peut également être programmer en langage C, en Python… mais c’est une autre histoire…
Voici donc quelques liens :
Un bon tuto sur OpenClassRoom 8
Fabrication d’un Labyrinthe avec des cartons et des pièces imprimées en 3D 9
Un générateur de labyrinthe 10
Python dans une ATMega2560 11 pour les spécialistes
Autre capteur à ultrason SRF-02 en I2C
On pourra aussi envisager d’autres options comme des moustaches, un capteur pour suiveur de ligne…
Egalement l’option batterie 16850.
